英特尔正式发布了其创新的“具身智能大小脑融合方案”,旨在为机器人、自动化设备等智能体构建一种全新的系统架构与开发范式,以加速具身智能在现实场景中的规模化落地。该方案的核心在于通过软件层面的深度创新,将传统集中式“大脑”的复杂认知决策与分布式“小脑”的高效实时控制有机融合,为开发者提供了更高效、更灵活的软件开发工具与框架。
一、 方案核心理念:解耦与协同的软件架构
“大小脑融合”并非简单的硬件堆叠,其精髓在于一套全新的软件定义架构。在传统机器人系统中,感知、决策、规划与控制往往由一个中央处理器(大脑)串行处理,容易形成性能瓶颈,并难以应对突发、高动态的环境变化。英特尔的新方案在软件层面进行了根本性重构:
- “大脑”(Big Brain):通常指基于云端或本地高性能计算节点的智能中心,负责处理需要大量计算资源的任务,如复杂环境理解、长期任务规划、高级AI模型推理(如大语言模型交互)、知识库调用等。其软件开发侧重于抽象化、算法优化和云端协同。
- “小脑”(Little Brain):通常指嵌入在设备边缘(如机器人关节、传感器模组内)的智能单元,由英特尔®酷睿™、凌动®或FPGA等处理器驱动,专精于毫秒级实时响应、低延迟闭环控制、本能避障、局部路径重规划等。其软件开发强调确定性、低功耗和可靠性。
该方案的软件开发套件(SDK)和中间件,旨在让这两个层面的软件组件能够高效、安全地通信与协作,实现“大脑”宏观指挥与“小脑”微观执行的完美协同。
二、 软件开发的关键赋能工具
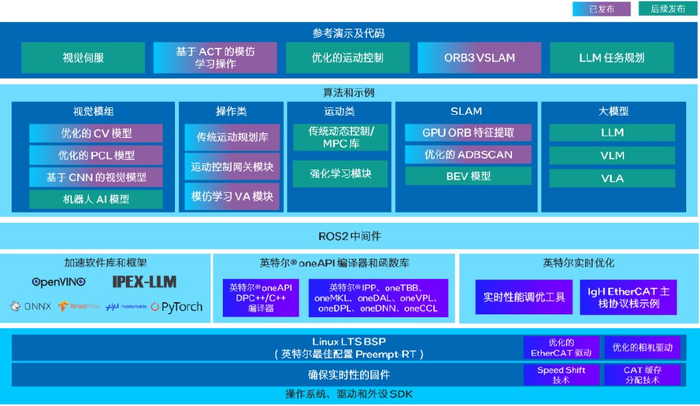
为了支持这一融合架构的快速开发,英特尔围绕软件开发提供了多层次的支持:
- 统一的编程模型与框架:提供跨“大脑”与“小脑”的异构计算编程抽象,降低开发者在不同硬件平台(CPU、GPU、VPU、FPGA)上部署和优化算法的复杂度。开发人员可以用更一致的逻辑来编写从云端策略到底层控制的代码。
- 实时与确定性通信中间件:开发了高性能的跨层级通信协议与API,确保“大脑”的指令能够可靠、及时地下发至“小脑”,同时“小脑”采集的海量传感器数据也能被高效筛选和上传,供“大脑”分析决策。这对于保障智能体在动态环境中的行为连贯性至关重要。
- “小脑”侧功能容器化:将常见的实时控制功能(如运动控制、力觉反馈、安全监控)封装成可复用、可独立升级的软件模块或“微服务”。开发者可以像搭积木一样,为不同的机器人形态快速配置和组合所需的小脑功能,极大提升了开发效率和系统灵活性。
- 仿真与数字孪生工具链:提供了从算法开发、系统仿真到真实部署的全流程软件工具。开发者可以在高度逼真的虚拟环境中,对大小脑融合的完整系统进行测试和调优,大幅降低实体机器人调试的风险与成本,加快从代码到产品的迭代速度。
- AI模型部署与优化工具:集成了OpenVINO™等工具,方便开发者将训练好的视觉、语音、决策AI模型高效地部署和运行在从云端到边缘的各类硬件上,实现AI能力在大小脑之间的合理分配与协同推理。
三、 构建落地新范式:从软件开发到行业应用
英特尔此方案通过上述软件创新,正在构建一种具身智能落地的新范式:
- 降低开发门槛:软硬件解耦的架构和丰富的工具链,使得机器人厂商和开发者可以更专注于上层应用和创新功能的开发,无需深陷底层异构系统整合的泥潭。
- 提升系统鲁棒性与适应性:小脑的局部自治能力使智能体在面对网络延迟、中断或突发状况时,仍能保持基本的安全运行和即时反应,提高了系统的整体可靠性。
- 实现规模化灵活部署:软件定义的架构使得同一套“大脑”算法可以适配和指挥不同形态、具备不同“小脑”配置的机器人,有利于解决方案的快速复制和定制化。
目前,该方案已在工业机械臂、物流AMR(自主移动机器人)、服务机器人等领域展开应用探索。例如,在复杂的仓储环境中,中央调度系统(大脑)可以规划整体货物分拣流程,而单个搬运机器人身上的“小脑”则负责实时避障、精准取放等动作,两者通过软件无缝衔接,共同提升作业效率与安全性。
英特尔®具身智能大小脑融合方案的发布,标志着具身智能的发展从追求单一算法精度,进入了强调系统级工程化、软件定义架构的新阶段。其通过一系列先进的软件开发工具与理念,为解决智能体在复杂物理世界中感知、决策、执行的协同难题提供了切实可行的路径。随着该方案生态的不断完善,有望吸引更多开发者投身其中,共同推动具身智能从实验室和有限场景,走向更加广阔、多样的现实世界应用,真正开启智能机器普及的新篇章。